Research
NPGC: Privacy-Preserving Synthetic Educational Data
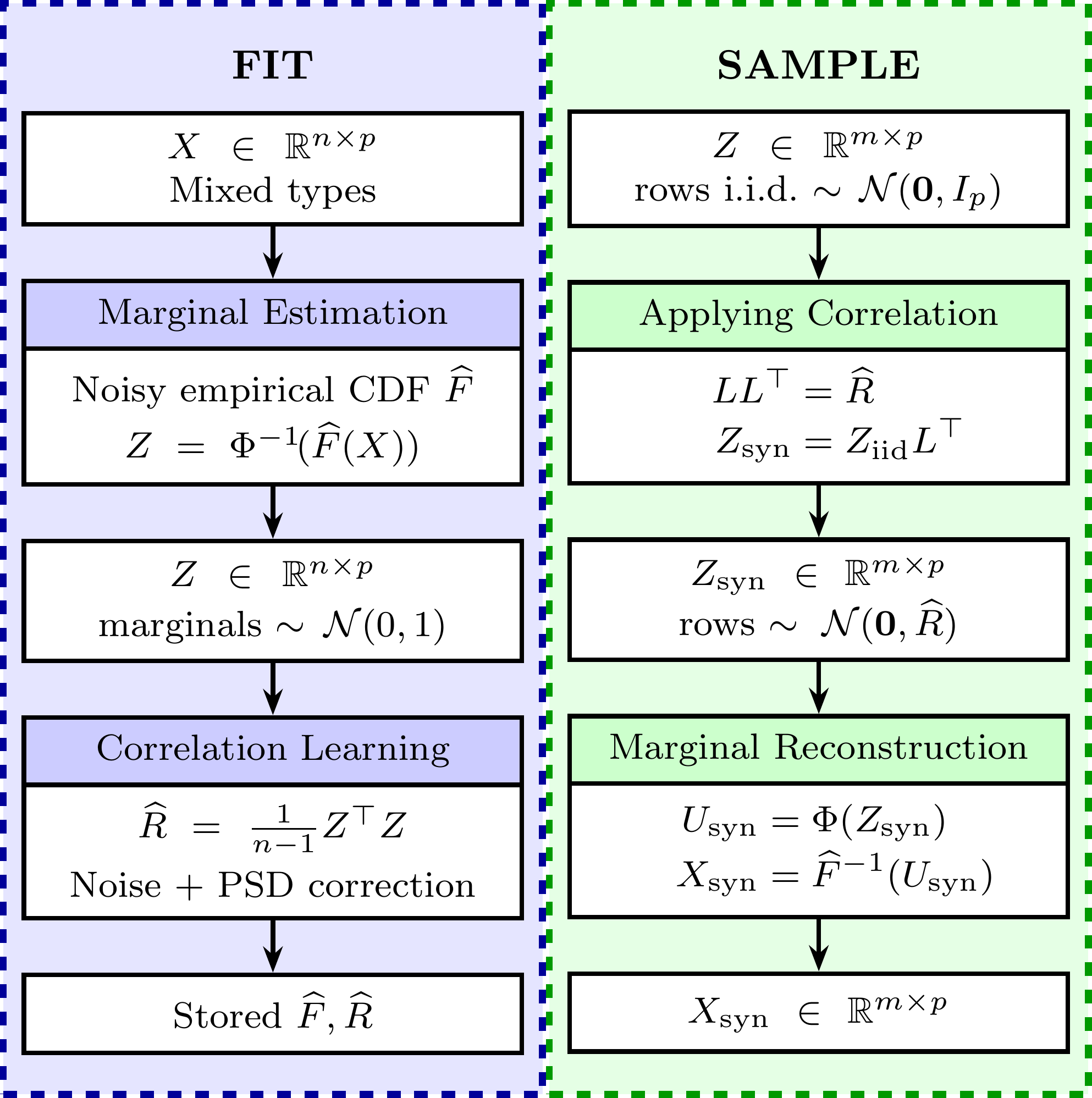
In collaboration with Dr. Lorenzo Luzi, Dr. Debshila Basu Mallick, and Dr. Richard Baraniuk at Rice University and OpenStax, I developed the Non-Parametric Gaussian Copula (NPGC), a plug-and-play synthetic data generator for Educational Data Mining (EDM) that operates within strict privacy-protecting regulatory frameworks. Existing deep learning and parametric generators often distort marginal distributions and degrade under iterative regeneration; NPGC instead anchors synthesis to empirical statistics to preserve observed marginals while modeling dependencies through a copula framework, and integrates Differential Privacy (DP) at both the marginal and correlation levels. We evaluated NPGC against deep learning and parametric baselines on five benchmark datasets, showing it remains stable across multiple regeneration cycles at substantially lower computational cost, and validated it through deployment in a real-world online learning platform.(Díaz-Ramos et al., 2026)
RCNNs for Obstacle Avoiding Rectilinear Steiner Minimum Tree (OARSMT)
In collaboration with Dr. Richard Baraniuk and Dr. Toros Arikan at Rice University, I am working on the Obstacle Avoiding Rectilinear Steiner Minimum Tree (OARSMT) problem. OARSMT is an important challenge in graph and optimization theory, where we aim to find the shortest path to connect terminals in a rectilinear graph while avoiding obstacles. Given that OARSMT is NP-hard, we developed MazeNet, a deep learning-based solution using Recurrent Convolutional Neural Networks (RCNNs) to frame this task as a maze-solving problem. MazeNet excels in scalability, as its pre-trained RCNN blocks allow us to solve problems with a large number of terminals by simply using recurrence. MazeNet achieves perfect accuracy comparable to exhaustive methods while maintaining the reduced runtimes of state-of-the-art approximation algorithms, making it a promising approach for applications in VLSI design and robotics.(Díaz-Ramos et al., 2024)
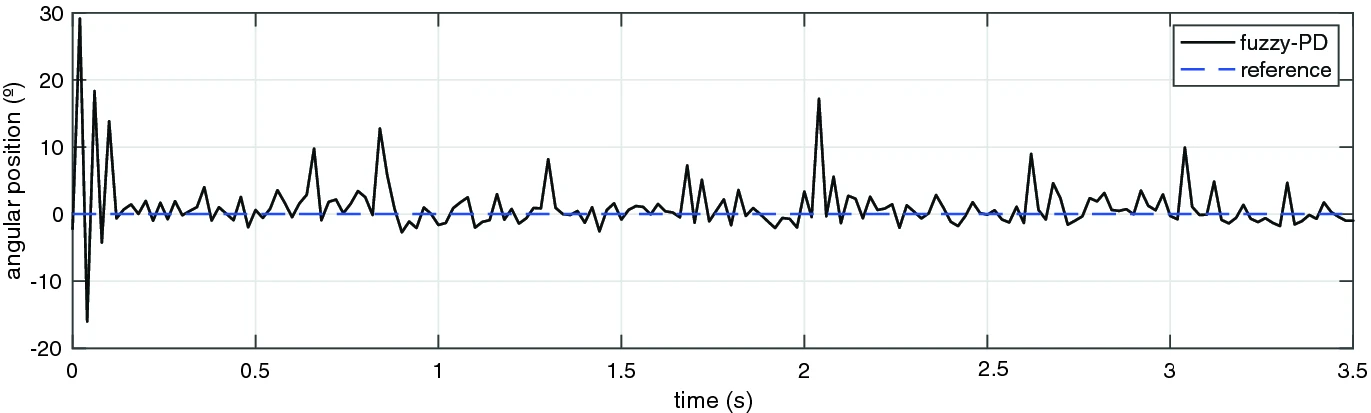
Fuzzy Control
In a project for Universidad Panamericana on a legged robot inspired by chameleons, I worked under Dr. Hiram Ponce and played a key role in developing the robot's control system, which is essential for maintaining balance and walking in a straight line. I focused on setting up the control mechanisms that enable the robot to navigate challenging terrains efficiently. My contributions included mathematical modeling and simulations that guided our design decisions, ensuring that the robot could walk in a straight line with stability and precision. This research is crucial for enhancing robotic navigation in environments where maintaining a straight path is critical.(Ponce et al., 2022)
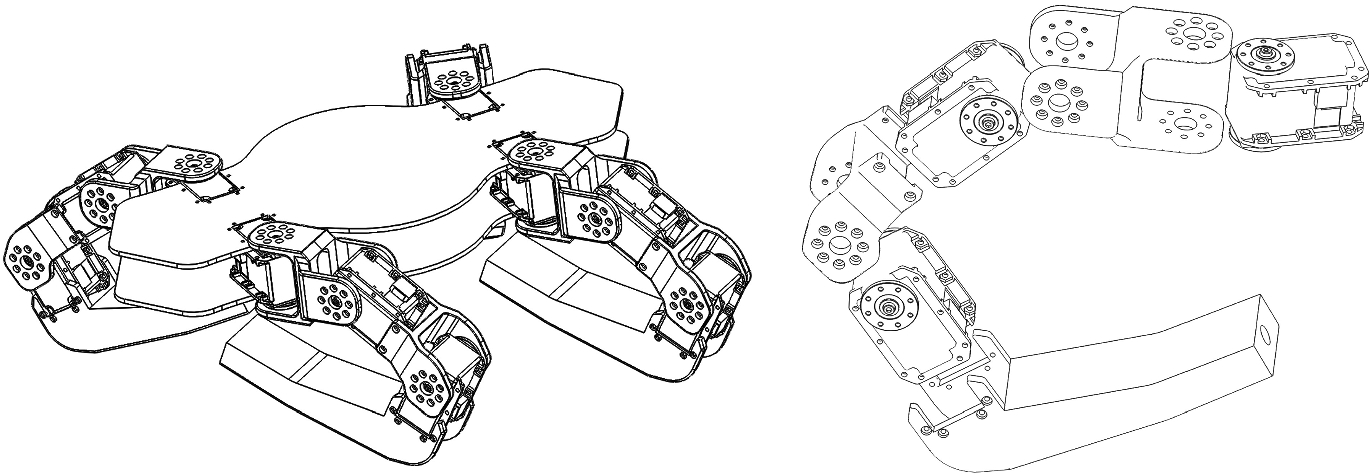
CAD Design and Manufacture
In a project for Universidad Panamericana on a legged robot inspired by chameleons, I worked under Dr. Hiram Ponce and was deeply involved in its CAD design and manufacturing. Using advanced CAD software, I meticulously designed the robot, ensuring precise dimensions and functionality. The manufacturing process combined 3D printed components with custom-fabricated parts. This comprehensive approach allowed us to create a robust and functional prototype, demonstrating the importance of precise design and manufacturing in producing high-quality robotic systems.(Ponce et al., 2019)